PLF视觉定位系统是用于零件精确定位的软件系统。它使得SICK可以根据客户具体应用需求通过PLOC2D和PLR3200传感器的灵活配置,可提供创新性的视觉产品解决方案,满足客户需求的定制化视觉系统。
针对料架内零件的视觉定位引导系统具体需求,基于先进的2D与3D视觉技术,通过灵活配置系统方案满足客户预期用途,即使在变幻不定的环境条件下依旧是针对零件定位的可靠的卓越解决方案。
PLF视觉系统借助三维图像处理技术用以定位物体,非常有助于优化工业生产过程。
针对料架内零件的视觉定位引导系统具体需求,基于先进的2D与3D视觉技术,通过灵活配置系统方案满足客户预期用途,即使在变幻不定的环境条件下依旧是针对零件定位的可靠的卓越解决方案。
PLF视觉系统借助三维图像处理技术用以定位物体,非常有助于优化工业生产过程。
SICK 机器人导向系统将这一高品质技术以简单且低成本的方式供用户使用。该系统具备可靠性和易用性的特点。它能毫无问题地集成到现有环境中,提供高精度的测量结果并且非常有助于零件操作的灵活性。
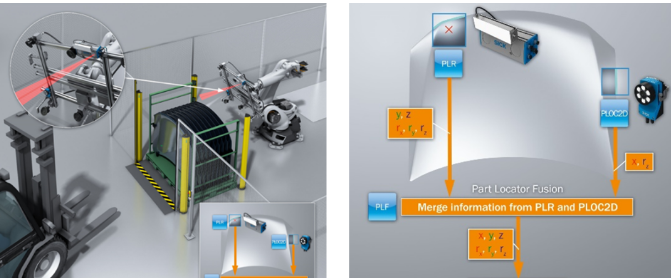
PLF系统是将SICK的PLOC2D和(/或)PLR3200传感器结合到高级定制视觉解决方案中的软件系统,用于机器人在零件定位中的指导。
PLF被部署为一个传感器(主)上PLOC2D或PLR3200软件之上的另一层。机器人与PLF交互,而不是与主传感器上的PLOC2D / PLR3200交互,以触发所有相关传感器上的功能。
返回的结果是每个传感器的单独贡献的组合。参见下图所示的配置示例,其中PLF软件部署在成为主设备的PLOC2D传感器上。
同时,PLR3200成为从属传感器。但是,由于PLF实际上控制两个传感器,因此PLOC2D软件也具备从属测量功能,就像另一个传感器上的PLR3200软件一样。
PLF适用于(但不限于)拆料,卸货和物料搬运等应用。对于习惯于PLR3200的用户,会对我们这次介绍的许多概念感到熟悉,这是因为PLF在相关情况下使用的是类似的方法。
机器人通过一个简单的控制接口与PLF通信,通过该接口将命令发送到PLF,并以3D部分姿势数据的形式返回响应。支持具有6个自由度的全帧(x,y,z,rx,ry和rz)。
PLF的主要任务是提供一个校正框架,以调整机器人的工作基座。当机器人进行此校正时,其相对于当前零件的位置变得非常接近,因为它相对于示教时的零件是相对的。
在测量周期中,机器人将移动到测量位置,而基于PLF的系统将测量零件姿态。测量结果得到一个基础校正帧,该帧被发送给机器人。如果校正值较大,则必须重新定位基于PLF的系统(在基本校正后移至测量位置),然后执行第二次测量。为了确保高水平的测量精度,必须重新定位(参见下图)。测量完成后,机器人会校正工作台,然后执行预定义的动作,例如拾取并运输零件。
PLF不包含图形用户界面,而是通过通过FTP上传到主传感器的配置文件进行配置的。在操作期间,与PLF的交互仅限于机器人命令。
上一篇:SICK:激光雷达3D扫描平台
下一篇:电容式接近传感器应用大揭秘!
